3. Main Engine Controller (MEC)
Der Main Engine Controller (MEC) ist eine Elektronikeinheit, die zu jedem Haupttriebwerk gehört. Er besteht aus zwei Computern und der dazugehörigen Elektronik, um alle Komponenten und Operationen des Haupttriebwerks zu überwachen. Der Controller ist stoßgeschützt an der Hauptbrennkammer montiert.
Jeder Contoller arbeitet im Verbund mit Triebwerksensoren, Ventilen, Stellmotoren und Funkenzündern und stellt ein abgeschlossenes System für die Triebwerkskontrolle, -fehlersuche und -überwachung dar. Der Controller überprüft die Flugtauglichkeit des Triebwerks, liefert die Triebswerksstart- und Abschaltsequenz, kontrolliert Triebwerksschub und Mischverhältnis der Treibstoffe, Sensorempfindlichkeit, Ventilstellmotor- und Funkenzündersignale, sorgt für Triebwerksleistungsüberwachung, bordgestützte Triebwerksfehlersuche, Reaktion auf Orbiterkommandos und Übertragung von Informationen über den Treibwerksstatus sowie von Leistungs- und Verbrauchsdaten.
Jeder MEC empfängt Triebwerkskommandos von den Orbiter-Hauptcomputern (GPC - General Purpose Computer) über seine eigene Triebwerksschnittstelleneinheit (EIU - Engine Interface Unit). Der Controller gibt seine eigenen Befehle an die Komponenten des Haupttriebwerks weiter. Triebwerksdaten werden zum Controller weitergeleitet, wo sie in einer Orbiter-Datentabelle im Controllercomputer gespeichert werden. Daten über den Controllerstatus, die im MEC-Computer gespeichert werden, werden ebenfalls den Orbiter-Datentabellen hinzugefügt. Diese Tabellen werden periodische über die EIU an die Hauptcomputer des Orbiters übertragen. Über eine 60 KB PCM-Telemetrieverbindung je Triebwerk werden die Daten in Echtzeit zur Bodenkontrolle übermittelt.
Die Triebwerksschnittstelleneinheit (EIU) ist ein spezialisierter Multiplexer/Demultiplexer, der zwischen die Hauptcomputer und den Triebwerkscontoller geschaltet ist. Wenn die EIU Triebwerksbefehle erhält, werden diese Daten in einem Puffer vorgehalten bis sie von den Hauptcomputern abgerufen werden. Die EIU sendet dann die Daten an jeden der Hauptcomputer. Jede EIU ist einem Haupttriebwerk zugeordnet und kommuniziert ausschließlich mit dem entsprechenden Controller. Die EIUs haben keine Verbindung untereinander.
Der Controller überwacht den Triebwerksschub und das Treibstoffmischungsverhältnis durch seinen Computer, der die Anweisungen an die Triebwerkssteuerelemente 50 mal je Sekunde (alle 20 Millisekunden) erneuert. Ein redundantes System, das eine normale Funktion nach der ersten Fehlfunktion erlaubt und nach der zweiten Fehlfunktion zu einem Sicherheitsabschalten führt, erhöht die Zuverlässigkeit des Treibwerks. In jedem Controller werden nur hochzuverlässige Elektronikteile verwendet.
Der digitale Computer ist programmierbar, wodurch Triebwerkskontrollgleichungen und Triebwerkskonstanten durch Austausch der Software modifiziert werden können. Der Controller ist in einem abgedichteten, druckbeaufschlagten Gestell untergebracht und wird durch Konvektion über Kühlrippen gekühlt. Die Elektronik ist in funktionelle Module aufgeteilt und gegen Hitze und Vibration geschützt.
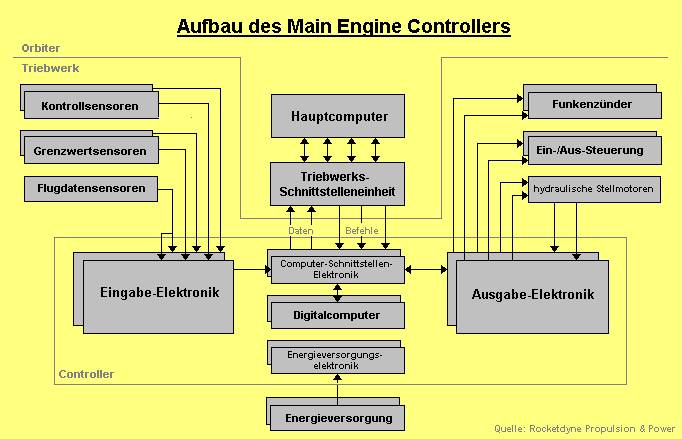
Der Controller ist in fünf Subsysteme unterteilt: Input- und Output-Elektronik, Computerschnittstelle, Digitalcomputer und Energieversorgungselektronik. Jedes System ist doppelt vorhanden, um eine Redundanz zu gewährleisten.
Die Input-Elektronik erhält die Daten aller Triebwerkssensoren, bereitet die Signale auf und wandelt sie in digitale Werte für die Verarbeitung im Computer um. Die Triebwerkskontrollsensoren sind redundant, die Verbrauchssensoren nicht.
Die Output-Elektronik verarbeitet die digitalen Steuerkommandos des Computers in Spannungswerte, die Funkenzünder, Ventile und Treibstoffventilstellmotoren steuern.
Die Computerschnittstellenelektronik überwacht den Datenfluß innerhalb des Controllers, den Dateneingang in den Computer und Computerbefehle an die Output-Elektronik. Sie stellt auch die Schnittstelle zwischen der Elektronik des Triebwerks und der des Orbiters dar.
Über diese Schnittstelle werden Triebwerksbefehle des Orbiters über dreifach redundante Datenkanäle empfangen und Triebwerksstatus und -daten über doppelt redundante Datenkanäle, zur Raumfähre übertragen. Die Computerschnittstellenelektronik enthält die "Wachhund-Timer", die bestimmen, welcher Datenkanal des doppelt-redundanten Mechanismus die Kontrolle hat.
Der Controller-Computer ist ein General Purpose Computer, der die notwendige Rechenleistung für alle Triebwerkskontrollfunktionen besitzt. Der Speicher der originale Controller hatte eine Programmspeicherkapazität von 16.384 Daten und Befehlen (17-bit Worte; 16 Bit für Programmtext, ein Bit für Parität).
Die Energieversorgung wandelt den dreiphasigen 115-Volt-Wechselstrom mit 400 Hertz der Raumfähre in den Spannungslevel um, der vom Triebwerkskontrollsystem benötigt wird, überwacht den Energiefluß und hält ihn in den nötigen Grenzen.
Jeder der redundant arbeitenden Hauptcomputer des Orbiters, sendet Triebwerksbefehle zur Triebwerksschnittstelleneinheit (EIU) von wo die Befehle an den jeweiligen Triebwerkscontroller weitergeleitet werden. Jeder Hauptcomputer besitzt Softwareapplikationen für die Steuerung der Triebwerke. Die Triebwerksbefehle werden über den triebwerkszugehörigen Flight-Critical (FC) Datenbus ausgegeben. Insgesamt geben vier Hauptcomputer über vier Flight-critical Datenbusse Befehle aus. Demzufolge erhält jede EIU vier Befehle. Die nominale Konfiguration für den Aufstieg ins All besteht aus den Hauptcomputern 1, 2, 3, und 4, die über die FC Datenbusse 5, 6, 7 bzw. 8 Daten ausgeben. Jeder FC Datenbus ist mit einem Multiplexer-Schnittstellen-Adapter in jeder EIU verbunden.
Die EIU überprüft die erhaltenen Triebwerksbefehle auf Übertragungsfehler. Werden keine Fehler festgestellt, leitet die EIU die bestätigten Befehle zu den Computerschnittstellen-Bausteinen (CIA) weiter, die die Daten zum Triebwerkscontroller ausgeben. Triebwerksbefehle, die nicht bestätigt werden, werden nicht weitergeleitet. Stattdessen enden diese Befehle im Multiplexer-Schnittstellen-Adapter (MIA)der EIU. Befehle, die die MIAs 1 und 2 passieren, gelangen zu den CIA 1 bzw. 2. Befehle, die zu den MIAs 3 und 4 gelangen, passieren eine CIA 3-Datenauswahl-Logik. Diese Logik gibt denjenigen Befehl weiter, der zuerst zu ihr gelangt. Der andere Befehl endet in der CIA 3-Auswahl-Logik. Der gewählte Befehl wird durch die CIA 3 weitergegeben. Auf diese Weise werden die ursprünglich vier Befehle der GPCs auf drei Befehle reduziert.
Die Controller-Orbiter-Schnittstellen-Elektronik erhält die drei Treibwerksbefehle, die durch ihre EIU ausgegeben werden, prüft sie auf Übertragungsfehler und sendet die Befehle an die Controller-Elektronik A und B. Normalerweise führt die Elektronik des Kanals A, während die Kanal-B-Elektronik auch aktiv ist. Wenn Kanal A eine Fehlfunktion aufweist, übernimmt Kanal B die Kontrolle. Wenn darauffolgend auch Kanal B eine Fehlfunktion hat, wird das Triebwerk pneumatisch abgeschaltet. Wenn zwei oder drei verschieden Befehle weitergeleitet werden, gibt der Controller eigene Befehle aus, um die befohlene Funktion auszuführen. Wenn die Befehlsauswahl mißlingt und zwei oder alle drei Befehle versagen, wird der Triebwerkscontroller den letzten Befehl, der die Auswahl passiert hat, weiterleiten.
Der Backup-Flugsystem-(BFS)-Computer (Hauptcomputer No. 5) enthält Hardware-Schnittstellen-Softwareapplikationen. Wenn die vier primären Hauptcomputer (No. 1 bis 4) die Steuerung haben, befiehlt der BFS-Hauptcomputer nicht.
Wenn der Hauptcomputer No. 5 die Kontrolle hat, sendet das BFS Befehle zur EIU und fordert Daten von der EIU ab.
In dieser Konfiguration befehlen die vier primären Hauptcomputer nicht und warten auch nicht auf Daten. Wenn das BFS greift, erlaubt es dem Hauptcomputer No. 5 über das Hardware-Interface-Programm (HIP), die FC Busse 5 bis 8 zur Triebwerkskontrolle zu befehligen. Das HIP führt die gleichen Triebwerksbefehlsfunktionen aus wie das Triebwerkssteuerungsprogramm. Wenn das BFS aktiv ist, ist der Befehlsfluß durch die EIUs und Triebwerkscontroller der gleiche wie bei Steuerung durch die vier redundanten Hauptcomputer.
Die Triebwerkscontroller übermitteln alle Daten der Haupttriebwerke an die Hauptcomputer der Raumfähre.
Sensoren in den Triebwerken übermitteln Drücke, Temperaturen, Flußraten, Geschwindigkeiten der Turbopumpen, Ventilstellungen und Servoventilstellmotorpositionen an die Triebwerkscontroller.
Der Triebwerkscontroller sammelt diese Daten in einer Orbiter-Datentabelle und fügt Statusdaten über sich selbst hinzu. Die Orbiter-Datentabellen werden über Kanäle A und B an die Computerschnittstellenelektronik zur Übertragung an die EIUs weitergeleitet.
Die Computerschnittstellenelektronik gibt Daten ebenfalls über Datenkanäle A und B weiter.
Die Datenwege werden primär und sekundär genannt. Die Kanal A-Orbiter-Datentabelle wird vom Controllercomputer normalerweise sowohl über den primären als auch über den sekundären Weg gesendet. Danach gibt die Orbiter-Interface-Elektronik die Kanal B-Orbiter-Daten-Tabelle ebenfalls sowohl über den primären als auch über den sekundären Datenweg zur EIU aus.
Die Orbiter-Datentabelle wird vom Controller an die EIU gesendet. Es gibt nur zwei Datenwege im Gegensatz zu drei Befehlswegen zwischen EIU und Triebwerkscontroller. Der Datenweg, der mit CIA 1 verbindet, wird der primäre Datenweg genannt. Der Weg, der zum CIA 2 führt, heißt der sekundäre. Primäre und sekundäre Daten werden in Puffern aufbewahrt bis sie von den Hauptcomputern abgerufen werden. Die Hauptcomputer ruffen sowohl primäre als auch sekundäre Daten ab. Primäre Daten werden nur über die MIA 1 jeder EIU ausgegeben. Sekundäre Daten dagegen nur über MIA 4.
Vor dem Start überwachen die Computer des Orbiters sowohl primäre als auch sekundäre Daten.
Datenverluste, ob primär oder sekundär, führt zu einer Datenwegsfehlfunktion und damit zu einer Hemmung der Triebwerkszündung oder einem Abschalten aller drei Triebwerke vor dem Start.
Bei T - Zero fordern die Hauptcomputer sowohl primäre als auch sekundäre Daten aus den EIUs ab. Es werden jedoch nur die primären Daten auf Fehler überprüft. Sollte es zu einem Verlust der primären Daten kommen, was zwischen der Kanal A-Elektronik des Triebwerkscontrollers und Triebwerkssteuerungsprogramm auftreten kann, werden auch die sekundären Daten überprüft.
Es gibt zwei primäre Softwareprogramme für den Triebwerkscontroller: das Flugbetriebsprogramm (Flight Operational Program) und das Testbetriebsprogramm. Das Flugbetriebsprogramm ist ein online-, realtime- und prozeßkontrolliertes Programm, das Angaben von Triebwerkssensoren verarbeitet, die Triebwerksservoventil-, Ventilantriebs-, Magnetventil- und Funkenzünderfunktion überwacht, Befehle des Orbiter annimmt und verarbeitet, Daten an den Orbiter überträgt und Fehlersuch- und Überwachungsmöglichkeiten bietet.
Das Testbetriebsprogramm unterstützt die Triebwerkstests. Funktionell stimmt es mit dem Flugbetriebsprogramm überein, weicht aber hinsichtlich der Ausführung von diesem ab.
Die Softwareprogramme bestehen aus Modulen und sind definiert als Programmkomponenten, die aus einer tabellarischen Datenbank und 15 Computerprogrammkomponenten besteht.
Während des Anlegens der Programmkomponenten verarbeiten die Programme für den Orbiter Daten zur Fehlfunktionssuche und Statusermittlung.
Verschiedene Kombinationen von Kontrollfunktionen laufen zu verschiedenen Zeiten ab. Diese Kombinationen innerhalb einer Phase werden als Betriebsmodus definiert.
Die Phase der Fehlersuche initiiert eine aktive Überwachung oder Fehlersuche. Der Standby-Modus ist in dieser Phase ein Wartemodus des Controllerbetriebes während aktive Kontrollsequenzoperationen ausgeführt werden.
Überwachungsfunktionen, die nicht den Status der Triebwerke beeinflussen, sind währenddessen kontinuierlich aktiv.
Solche Funktionen schließen die Verarbeitung von Orbiterbefehlen, Statusupdates und Selbsttests des Controllers ein.
Während der Fehlersuche können Daten und Anweisungen in den Speicher des Controllercomputers geladen werden.
Dies erlaubt das Updaten von Sofware und Daten, wenn nötig, um mit Triebwerksstart- und Fehlersuchoperationen fortzufahren.
In dieser Phase werden auch einzelne Triebwerkssystemkomponenten auf Fehler überprüft, wie etwa Triebwerksleckagetests durchgeführt.
Die Startvorbereitungsphase besteht aus Säuberungen des Leitungssystems und Treibstoffvorbereitungen, die zur Vorbereitung des Triebwerksstartes durchgeführt werden.
Die Säuberungssequenz 1 ist die erste Säuberungssequenz, die Sauerstoffsystem- und Zwischendichtungssäuberungsoperationen umfaßt.
Die Säuberungssequenz 2 ist die zweite Säuberungssequenz, die die Wasserstoffsystemsäuberung und die Fortsetzung der in Sequenz 1 begonnen Aktionen beinhaltet.
Die Säuberungssequenz 3 schließt die Treibstoffrezirkulation (Bleed-Ventil-Operation) ein.
Die Säuberungssequenz 4 beinhaltet die weitere Wasserstoffsystemsäuberung und den Nachweis, daß das Triebwerk bereit zum Eintritt in die Startphase ist.
Der "Triebwerk-bereit-Modus" tritt ein, wenn stabile thermische Triebwerksbedingung erreicht und andere Kriterien für den Start, einschließlich der Fortsetzung der Säuberungssequenz 4, zufriedenstellend sind.
Die Startphase umfaßt Operationen, die mit der Zündung der Triebwerke verbunden sind.
Sie beginnt mit der Öffnung der Treibstoffventile (open-loop-Operationen).
Der Starteinleitungsmodus beinhaltet, daß alle Triebwerksfunktionen vor der Zündung normal sind und das Schließen der Schubkontrollschleife (closed-loop-Operationen). Der Schubaufbaumodus registriert die Triebwerkszündung durch Überwachung des Hauptbrennkammerdrucks und Bestätigung, daß die Schubaufbausequenz abläuft.
Die Hauptstufenphase wird automatisch erreicht, wenn die Startphase erfolgreich abgeschlossen wurde.
Der normale Kontrollmodus hat die Kontrolle des Mischungsverhältnisses eingeleitet und die Schubkontrolle arbeitet normal.
Im Falle einer Fehlfunktion wird automatisch der elektrische Sperrmodus aktiviert.
In diesem Modus werden die Treibstoffventile automatisch elektrisch in einer festen Konfiguration gehalten und alle Kontrollschleifenverbindungen werden eingefroren.
Es gibt ebenso den hydraulischen Sperrmodus, in dem alle Sicherheitsventile deaktiviert werden, um die Treibstoffventile hydraulisch in einer festen Konfiguration zu halten. Alle Kontrollschleifenfunktionen sind dann eingefroren.
Die Abschaltphase umfaßt die Operationen zur Verminderung des Brennkammerdruckes wobei alle Ventile mit dem Ziel des vollständigen Brennschlusses geschlossen werden.
Die Drosselung auf minimalen Schublevel ist der Teil des Abschaltens, der beim programmierten Abschaltschubreferenzlevel oberhalb des MPL abläuft.
Der Ventildrosselmodus ist das Stadium der Abschaltsequenz, nach dem der programmierte Schub unter das MPL abgefallen ist.
"Treibstoffventile geschlossen" ist das Stadium, nachdem alle Flüssigtreibstoffventile geschlossen sind, die Abschaltsäuberung aktiviert ist und Bestätigungssequenzen ablaufen.
Der Sicherheitspneumatik-Modus läuft ab, wenn das pneumatische Sicherheitsabschalten benutzt wurde.
Die Phase nach dem Abschalten umfaßt den Status der Haupttriebwerke und Triebwerkscontroller nach Brennschluß.
Der Standby-Modus ist ein Wartemodus der Controlleroperationen, dessen Abläufe identisch mit dem Standby-Modus während der Fehlersuche sind.
Dies ist der normale Modus, der nach Ende der Abschaltphase erreicht wird.
Die Beendigungssequenz beendet eine Säuberungssequenz durch einen Befehl vom Orbiter.
Alle Treibstoffventile sind geschlossen und alle Magnet- und Drehmomentmotorventile sind deaktiviert.
Jeder Controller arbeitet mit Wechselstrom, der durch die Triebwerksenergieabzweige auf Panel R2 bereitgestellt wird.
Jeder Controller hat interne elektrische Heizungen, die die Umgebungstemperatur regulieren und durch Energie des Hauptanschlusses über einen ferngesteuerten Energiecontroller betrieben werden. Der ferngesteuerte Energiecontroller (RPC) wird durch Schalter auf Panel R 4 überwacht. Die Heizer werden normalerweise bis zum Brennschluß nicht benutzt und werden nur angeschaltet, wenn es während der Mission notwendig sein sollte.
Zu Beginn des Jahres 1991 wurde ein weiterentwickelter Main Engine Controller zertifiziert, der eine größere Rechenleistung sowie zusätzliche Telemetrieverbindungen zur Überwachung der Triebwerksleistung während des Steigfluges hat. Der Erstflug des Block 2-Controllers (nicht zu verwechseln mit den Block 2-Triebwerken) fand mit dem Erstflug der Raumfähre Endeavour STS-49 am 7. Mai 1992 statt. Alle Triebwerke wurden danach bis Mitte 1994 mit den neuen Controllers ausgerüstet.
letztes Update: 23. Juli 2005, 16:30:35